Uma das imagens que sempre me cativou, a representação do movimento de um ponto material sobre uma superfície apenas sujeito ao seu próprio peso. Essa mesma figura é recorrente em muitos livros de física em particular em livros de gravitação, e em livros de divulgação, dita, científica. No entanto, apesar de todo o rigor inerente a qualquer um dos dois tipos de publicação, as equações usadas para construir essas figuras nunca aparecem.
Certamente por aquelas serem, é uma hipótese, uma representação de artista que tenta capturar a ideia rigorosa que se quer ilustrar.
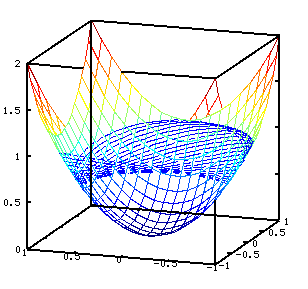
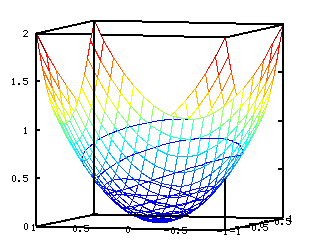
As duas figuras seguintes mostram o movimento de um ponto material sobre um
parabolóide, a primeira sem atrito e a segunda com atrito, com as mesmas
condições iniciais [0 1 1 0] (ver código em Octave mais à frente).
|
|
Vejamos então como construir as equações. Uma das formas de as obter é usando
o Principle of least constraint, que pode se visto como um certo tipo de método dos
mínimos quadrados. Tem o seguinte enunciado para um único ponto material: a aceleração de um
ponto material minimiza a quantidade  para quaisquer restrições cinemáticas
para quaisquer restrições cinemáticas

onde  ,
,  ,
,  e
e  ,
são respectivamente a massa e as componentes da força a que está sujeito o ponto.
,
são respectivamente a massa e as componentes da força a que está sujeito o ponto.
Como queremos obter a trajectória de um ponto material que se move sobre um
superfície apenas sujeito ao seu próprio peso, vem que,  e que
e que  e
e  onde
onde  é a aceleração da gravidade (uma constante positiva).
é a aceleração da gravidade (uma constante positiva).
É condição necessária para a existência de um mínimo que
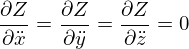
e obtém-se
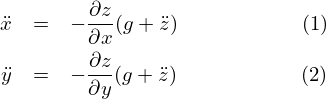 onde
onde

Esta última equação obtém-se de
 usando as equações de
usando as equações de  e
e
 .
.
O passo seguinte consiste em implementar a resolução numérica das equações (1) e
(2) em Octave. Assim, o sistema de e.d.o's é implementado pela função em Octave f.m,
para o caso de 
function xdot=f(x,t) dfdx=2*x(1); dfdy=2*x(3); d2fdx2=2; d2fdy2=2; d2fdxdy=0; g=1; k=0.05; xdot = zeros (4,1); d2z=(x(2)^2*d2fdx2+x(4)^2*d2fdy2+2*x(2)*x(4)*d2fdxdy-g*(dfdx^2+dfdy^2))/(1+dfdx^2+dfdy^2); xdot(1)=x(2); xdot(2)=-k*x(2)-dfdx*(g+d2z); xdot(3)=x(4); xdot(4)=-k*x(4)-dfdy*(g+d2z); endfunction;onde se inclui um termo de dissipação, proporcional ás velocidades, com coeficiente de atrito
k. Os comandos para gerar os gráficos anteriores são
#1 clear all clf l=1; xl=linspace(-l,l,20); yl=linspace(-l,l,20); [x y]=meshgrid(xl,yl); t = linspace (0, 100, 1000); xini=[0 1 1 0] z = lsode ("f", xini, t); hold on mesh(x,y,x.^2+y.^2) plot3(z(:,1), z(:,3),z(:,1).^2+ z(:,3).^2,'b')
As duas imagens seguintes mostram outras versões das mesmas figuras assim como os retratos de fase para cada uma da coordenadas
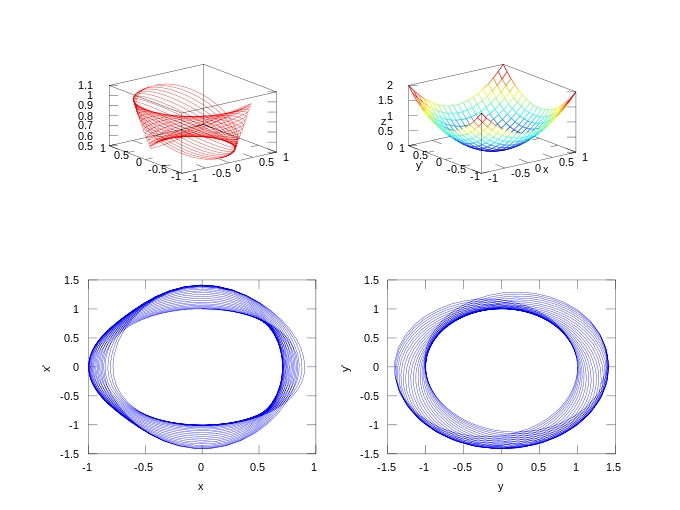 |
| sem atrito (k=0) |
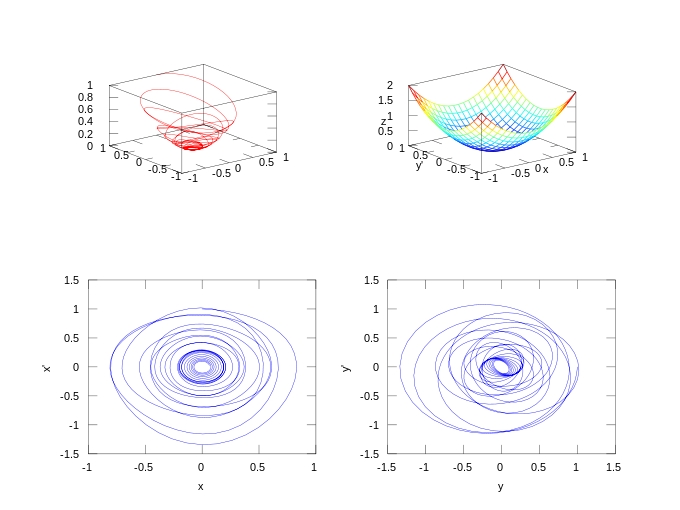 |
| com atrito (k=.05) |
Created: NaN
Last updated: 24-03-2026 [22:44]
For attribution, please cite this page as:
Charters, T., "Principle of least constraint": https://nexp.pt/constraint.html (24-03-2026 [22:44])
(cc-by-sa) Tiago Charters - tiagocharters@nexp.pt
