Some mathematical notes on a polargraph
A V-Bot is a simple drawing machine based on two-center bipolar coordinates. Here's some web references:
- The first: HECTOR
- The smartest: Der Kritzler
- The saddest: SADbot - the Seasonally Affected Drawing robot
- The coolest: IOIO Plotter
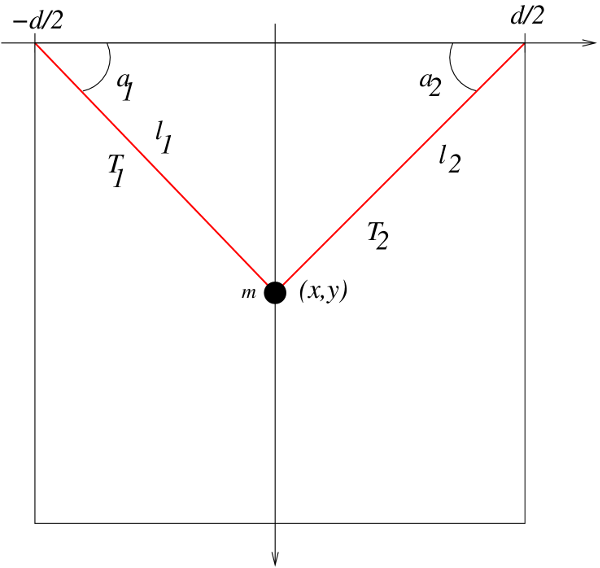
The layout of a V-Bot is quite simple, two motors at the upper vertices at a distance d, with two strings attached with lengths l1 and l2. The drawing pen rests at (x,y).
Problems to solve
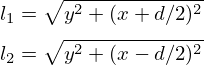
The typical math problems associated with robots are two: direct and inverse kinematics. In this particular case the inverse kinematics is easy to obtain, given the pen position obtain the lengths of the strings:
I'm using GNU/Octave, so here's some auxiliary functions:
function retval=l1c(x,y,d) retval= sqrt(y.^2+(x+d/2).^2); end
function retval=l2c(x,y,d) retval= sqrt(y.^2+(x-d/2).^2); end
These equations define a map from the cartesian coordinates (x,y) to (l1,l2).
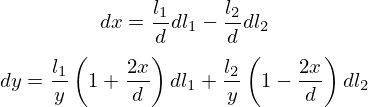
For the direct kinematics one has, with some simple algebra,
Drawing resolution
One can tackle the problem of finding the resolution in two ways. Using the Jacobian and the arc length of a curve.
The Jacobian
The Jacobian  defines the
ratio of a unit area in both coordinates. That is, it controls what happens
(direct kinematics) when a unit
area in (l1,l2) coordinates is transformed in to (x,y) coordinates, it
expands, contracts or stays the same. Values for
J greater than one gives an area expansion, lower than one the area is reduced. The Jacobian
controls the resolution of the drawing region.
defines the
ratio of a unit area in both coordinates. That is, it controls what happens
(direct kinematics) when a unit
area in (l1,l2) coordinates is transformed in to (x,y) coordinates, it
expands, contracts or stays the same. Values for
J greater than one gives an area expansion, lower than one the area is reduced. The Jacobian
controls the resolution of the drawing region.
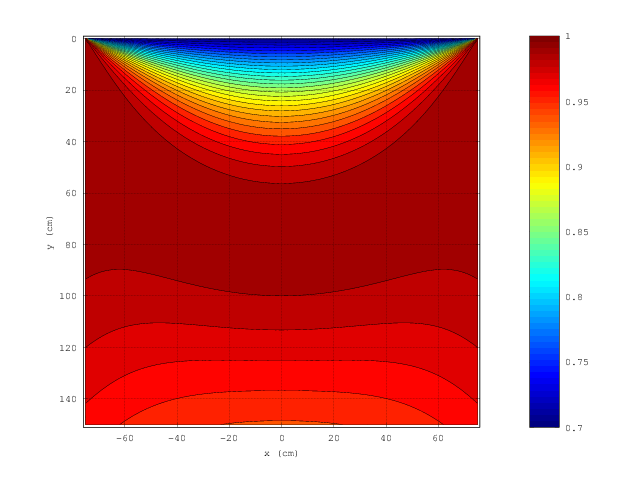
What happens when the Jacobian is zero? In simple terms it means that the transformation breaks, i.e. one can not use the transformation between (x,y) and (l1,l2) to control the robot, and so at the points or at the lines where Jacobian is zero the robot can not be controlled (you can guess by simple inspection, with no math, what these lines/points are ;) ).
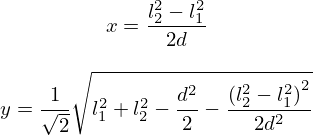
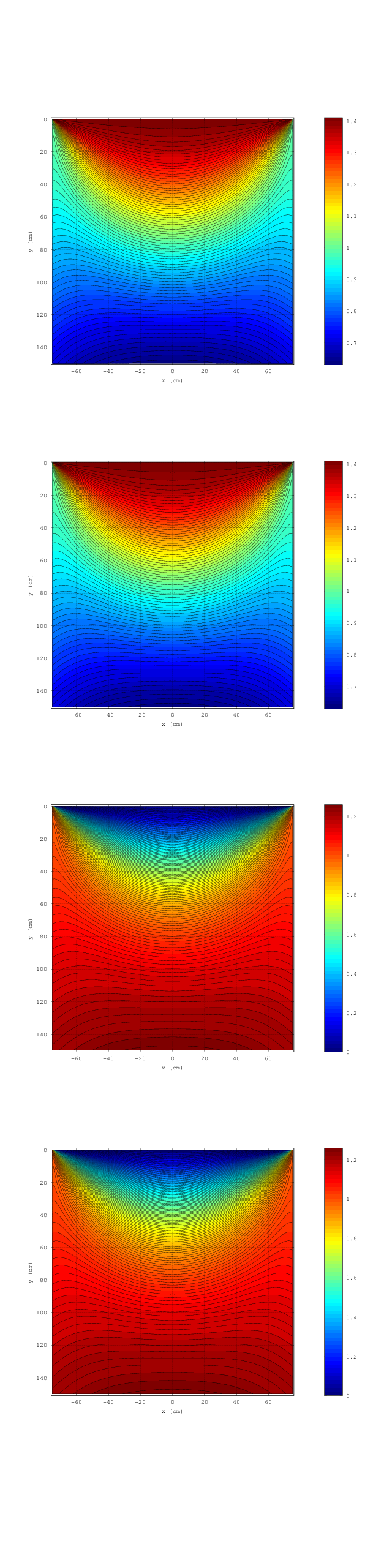
The Jacobian is given by
The next image shows the value of this Jacobian as a function of (x,y)
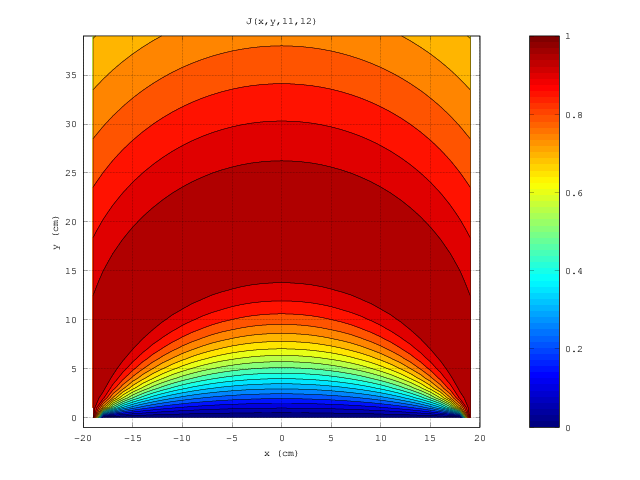
The code for the Jacobian J(x,y,l1,l2) is given by
function retval=jac(x,y,d) retval=2*1c(x,y,d).*l2c(x,y,d)./(d*y); end
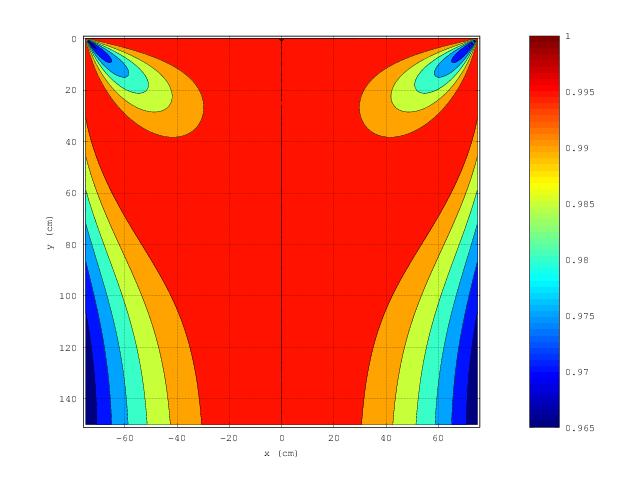
For the inverse kinematics the Jacobian is the reciprocal of J(x,y,l1,l2), that is
1/J(x,y,l1,l2). In this case one gets
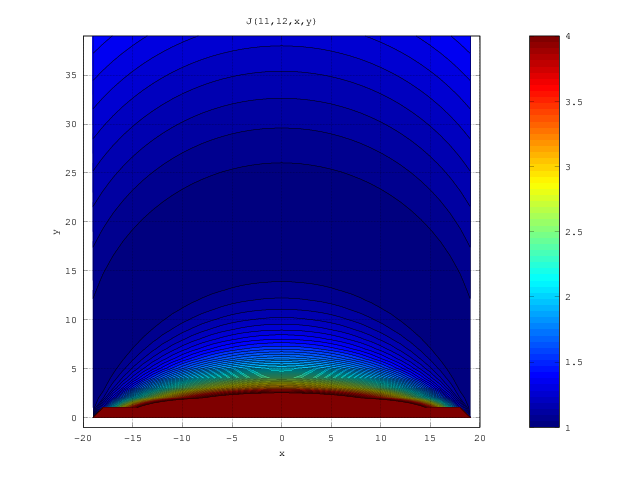
As expected (see pics) the problematic lines are l1+l2=d or simply the line y=0 for any x.
The previous plots shows the "good" areas for drawing, somewhere below the y=0 line (10cm?). Will see the same result when considering the tension on the strings (see below).
The arc length of a curve
The the arc length of a curve can be used to determine the "good" plotting region for the robot. This is done by taking the first order Taylor expansion of the direct and inverse kinematics equations. This however requires some prior considerations.
Because the relation between (x,y) and (l1,l2) is non-linear any variation (x,y) will produce a non-linear variation in (l1,l2) this variation is path dependent, the propagation of the variations depends if, for example, the pen goes right and then up or by the hypotenuse to the same point on the drawing board.
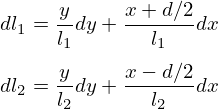 and
and
Here goes:
function retval=lenghtl(x,y,dx,dy,d) dl1=(y.*dy+(x+d/2).*dx)./l1c(x,y,d); dl2=(y.*dy+(x-d/2).*dx)./l2c(x,y,d); retval=sqrt((dl1.^2+dl2.^2)/(dx.^2+dy.^2)); end
function retval=lenghtxy(x,y,dl1,dl2,d) dx=l1c(x,y,d)./d.*dl1 - l2c(x,y,d)./d.*dl2; dy=l1c(x,y,d).*(1-2*x/d)./(2*y).*dl1 + l2c(x,y,d).*(1+2*x/d)./(2*y).*dl2; retval=sqrt((dx.^2+dy.^2)/(dl1.^2+dl2.^2)); end
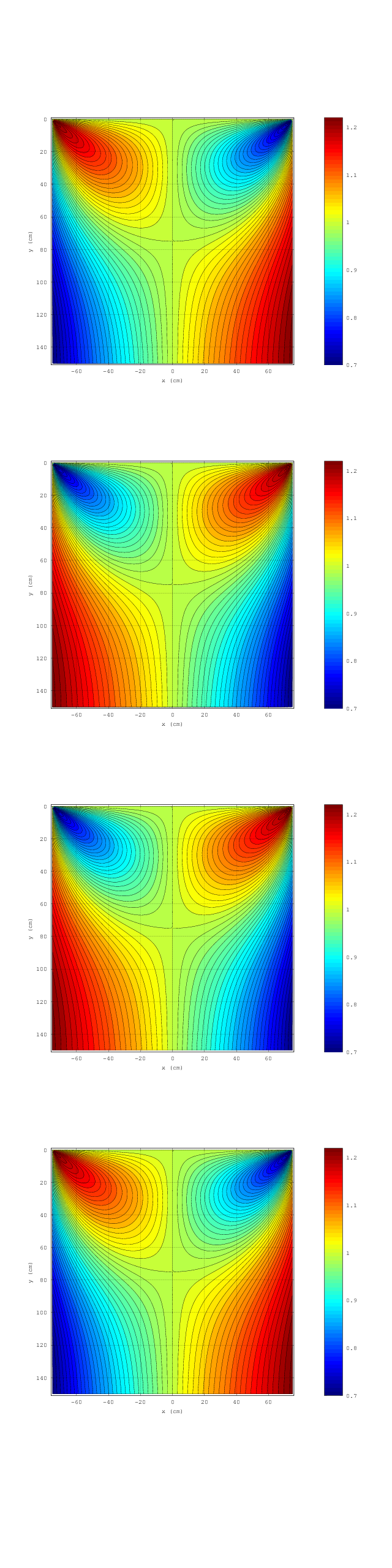
The next plot shows the ratio of unit lengths in the direct kinematics plotted in the (x,y) plane by taking the average on the 4 movements of the pen (right,0), (left,0), (0,up) and (0,down)1.
The next plot takes the average length on 4 movements of the pen (left,up), (right,up), (left,down) and (right,down)2.
This last plot is similar to the final plot obtained by Bill Rasmussen. My point is that in this way we only account for the variation of the length of a straight segment in this coordinate transformation. Obviously the length changes after the transformation due to the non-linearity of the transformation and reflects the loss of resolution but the right way to determine the resolution is using the Jacobian.
The ends of the control lines in the above picture seem to be further away from the plotting surface than V plotters commonly seen on the internet.
That's just because the important tool to measure resolution is the Jacobian, even thought many of the V-Bot builders do not know about it ;)
What about the tension on the strings?
One should also take into account the tension on each string. With some trigonometry one gets
There's only one singular configuration that one should take note, the case  which yields
which yields 
function retval=tension(x,y,d) m=1; g=1; l1=sqrt(y.^2+(d/2-x).^2); l2=sqrt(y.^2+(d/2+x).^2); cosa1=(d/2+x)./l1; cosa2=(d/2-x)./l2; sina1=y./l1; sina2=y./l2; T1=m*g*cosa2./(cosa1.*sina2+cosa2.*sina1); T2=m*g*cosa1./(cosa1.*sina2+cosa2.*sina1); retval=sqrt(T1.^2+T2.^2); end
This is shown in the following plot:
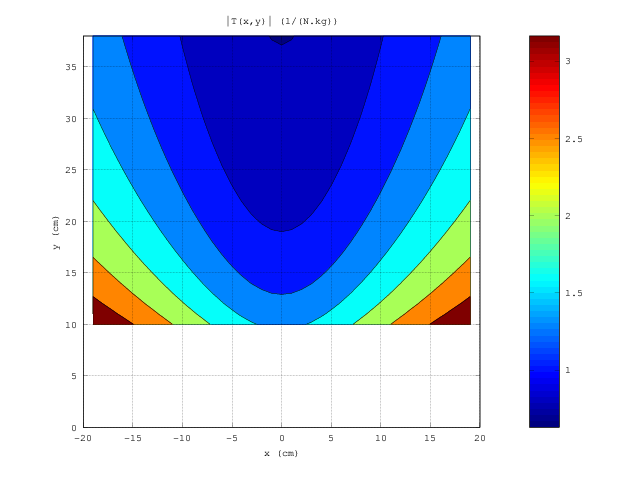
Also the cases of null tension on one of the strings  ,
,  or
or  ,
,  yields, respectivly,
yields, respectivly,  and
and  or
or  and
and  .
.
1. Vertical displacements: (right,0), (left,0), (0,up) and (0,down)
2. Oblique displacements: (left,up), (right,up), (left,down) and (right,down)
Refs.:
Tags: v-bot, dc motor, math, physics, polargraph
Fotografias variadas
; INVALID LISP CODE
Tags: fotografias
ToDo
Coisas ainda por fazer, tecnicidades web para o blog
Incluir no *header* de cada página:as keywords para cada página;o link de rss;o ico ;
;
Gerar RSS com as *tags*usando as *keywords*. - Incluir radiciação em Português com o algoritmo de Porter para cada página gerada.
incluir uma secção de notas breves com feed para oTwitter.- Gerar index por categorias/keywords/tags
Tags: blog, web, rss, todo
Thank you
Thank you for contacting me I will reply as soon as possible.
Cheers.
Tags: thanks
Test
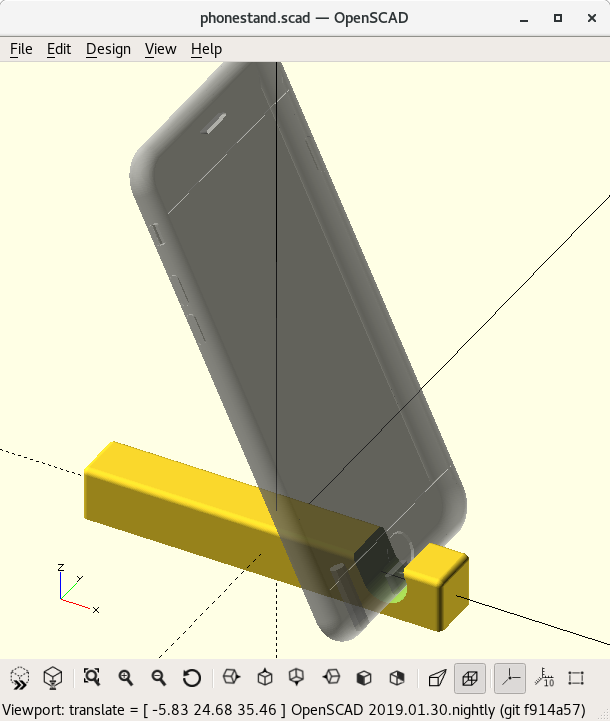
// Author: Tiago Charters // Maintainer: Tiago Charters // Copyright (c) - 2023 Tiago Charters de Azevedo (tiagocharters@nextp.pt) // This program is free software; you can redistribute it and/or modify // it under the terms of the GNU General Public License as published by // the Free Software Foundation; either version 3, or (at your option) // any later version. // This program is distributed in the hope that it will be useful, // but WITHOUT ANY WARRANTY; without even the implied warranty of // MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the // GNU General Public License for more details. // You should have received a copy of the GNU General Public License // along with this program; if not, write to the Free Software // Foundation, Inc., 51 Franklin Street, Fifth Floor, // Boston, MA 02110-1301, USA. //////////////////////////////////////////////////////////// phi=1.618; b=20; h=10*phi; rc=.1*h; //////////////////////////////////////////////////////////// //cellphone dimensions (mm) //////////////////////////////////////////////////////////// l=160; c=2*50; d=40; hc=10; theta=20; //tilt angle a=l/2*cos(theta); module phonestand(){ difference(){ minkowski(){ cube([a-2*rc,b-2*rc,h-2*rc],center=true); sphere(rc,$fn=64);} // cellphone translate([a/2*cos(theta)-2*rc-hc/2,0,0]) rotate([0,-theta,0]) hull(){ translate([0,0,l]) rotate([90,0,0]) cylinder(h=50,r=hc/2,center=true); rotate([90,0,0]) cylinder(h=50,r=hc/2,center=true);} translate([0,0,-h+rc*(1-sqrt(2)/2)]) cube([a+1,a,h],center=true); translate([-b/2,0,0*h/2]) minkowski(){ cube([a/1.707-2*rc,b/2-2*rc,10*h-2*rc],center=true); sphere(rc,$fn=64);} } } phonestand();


Tags:
- Aula nº 2
- Impressoras RepRap, Cadeia de software (cad, stl, slicer, print), Firmware, g-code.
- Tarefa
- Escolher uma impressora "preferida" (ver lista anterior); apresentações e justificações.
- Aula nº 3
- Oficina Digital do ISEL, projectos de antigos alunos, impressoras RepRap disponíveis, início d e discussão
- Aula nº 3 (19/10/2020)
- Apresentação de RepRap escolhidas; discussãos sobre os suportes de telemóveis.
- Aula nº 4 e 5 (20/10/2020)
- Apresentação de RepRap; Slicer: slic3r; novo projecto.
Tarefa: Conclusão do mini-projecto: desenhar e imprimir um suporte para telemóvel. Início de novo procjeto com tema UpCycle
Algumas referências para este projecto:
- https://www.myminifactory.com/category/upcycling
- https://cults3d.com/en/3d-model/home/mini-groww-desktop-greenhouse
- https://cults3d.com/en/collections/best-stl-files-upcycle-3d-printing
- https://www.thingiverse.com/search?q=upcycle&type=things&sort=relevant
- https://www.instructables.com/Isobaric-Loaded-Jar-Speaker/
- Aula nº 6 (26/10/2020)
- Discussão final dos modelos para impressão 3D. Novo projecto upcycling.
- Aula nº 7 (02/11/2020)
- Discussão final dos modelos para impressão e discussão de modelos já impressos.
- Aula nº 8 (02/11/2020)
- Projecto upcycling, propostas e dificuldades. Bibliotecas Openscad: BOSL, dotSCAD, NopSCADlib, BOLTS. MOST. Threads.
- Tarefa para a próxima aula:
- Dar uma espreitadela no blog HydraRaptor.
- Aula nº 9 (02/11/2020)
- Projecto upcycling; contrução exemplos.
- Aula nº 10 (09/11/2020)
- Fim do projecto de upcycling. Introdução de novo projecto: abcdário mecânico.
Referências adicionais
Modulo: RepRap
- RepRap, The RepRap project: an open source/open hardware movement for 3D-printing, Printrun
- Marlin 3D print firmware, LULZbot CURA, slic3r, Ultimaker Cura
- Construção de uma RepRap
Hardware OpenSource
- TEDxBoulder - Nathan Seidle - How Open Hardware will Take Over the World, Lulzbot factory tour and Open Hardware business model, The Law of Accelerating Returns, Do Makers Propose a More Open Source Future?, Open Source Software Went Nuclear This Year, Can Open-Sourcing Transform Electronics Hardware?, The (awesome) economics of open source, Open Source Licenses, Creative Commons - About The Licenses, The Future of 3D Printing: Smarter IP Strategies, Less Lawsuits, John Deere Just Cost Farmers Their Right to Repair, TEDxCornellUniversity - Jeremy Blum - Open Source Society
Comunidade
CAD OpenSource
Open Source Appropriate Technology
- 3-D Printing of Open Source Appropriate Technologies for Self-Directed Sustainable Development, Open source 3-D printing of OSAT, How 3D Printers Are Boosting Off-The-Grid, Underdeveloped Communities, Recyclebot, Civilization starter kit - Marcin Jakubowski, The Case for Open Source Appropriate Technology,
Outras coisas
- Joshua Pearce, “Open-Source Lab, How to Build Your Own Hardware and Reduce Research Costs”, ISBN: 9780124104860, Elsevier
- First International Workshop on "Low-cost 3D Printing for Science, Education and Sustainable Development
- Post processing for FDM printed parts, Low-Cost Injection Molding Using 3D Printing,x MyMiniFactory's Design Handbook,A third industrial revolution, Open-source metal 3-D printer
Utilidades OpenSCAD
// // Mendel90 // // GNU GPL v2 // nop.head@gmail.com // hydraraptor.blogspot.com // // See http://hydraraptor.blogspot.com/2011/02/polyholes.html // function sides(r)=max(round(4*r),3); function corrected_radius(r,n=0)=0.1+r/cos(180/(n ? n : sides(r))); function corrected_diameter(d)=0.2+d/cos(180/sides(d/2)); module poly_circle(r,center=false){ n=sides(r); circle(r=corrected_radius(r,n),$fn=n,center=center);} module poly_cylinder(h,r,center=false){ n=sides(r); cylinder(h=h,r=corrected_radius(r,n),$fn=n,center=center);} module poly_d_cylinder(r,center=false){ n=sides(r); r=corrected_radius(r,n); cylinder(h=h,r=r,$fn=n,center=center); translate([0,-r,0]) cube([r,2*r,h]);} module poly_sphere(r,center=false){ n=sides(r); sphere(r=corrected_radius(r,n),$fn=n,center=center);}
https://en.wikiversity.org/wiki/Open_Source_3-D_Printing#Module_0:_RepRap_Build https://docs.google.com/document/d/1X_5jd2Rn8OTCEUf-uO7pvVTAfawgpHSvyQUH-Sm1sbA/edit
</comment>Tags:
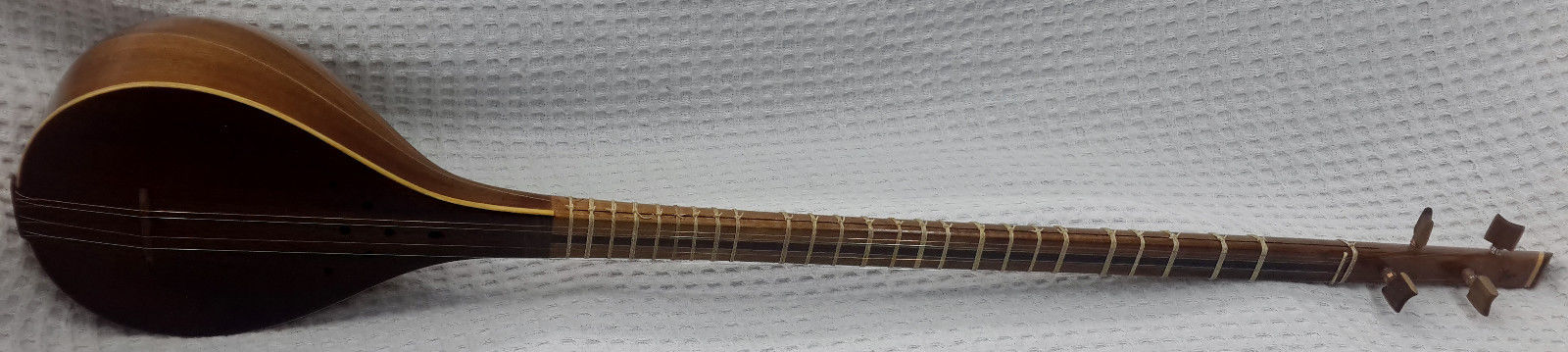
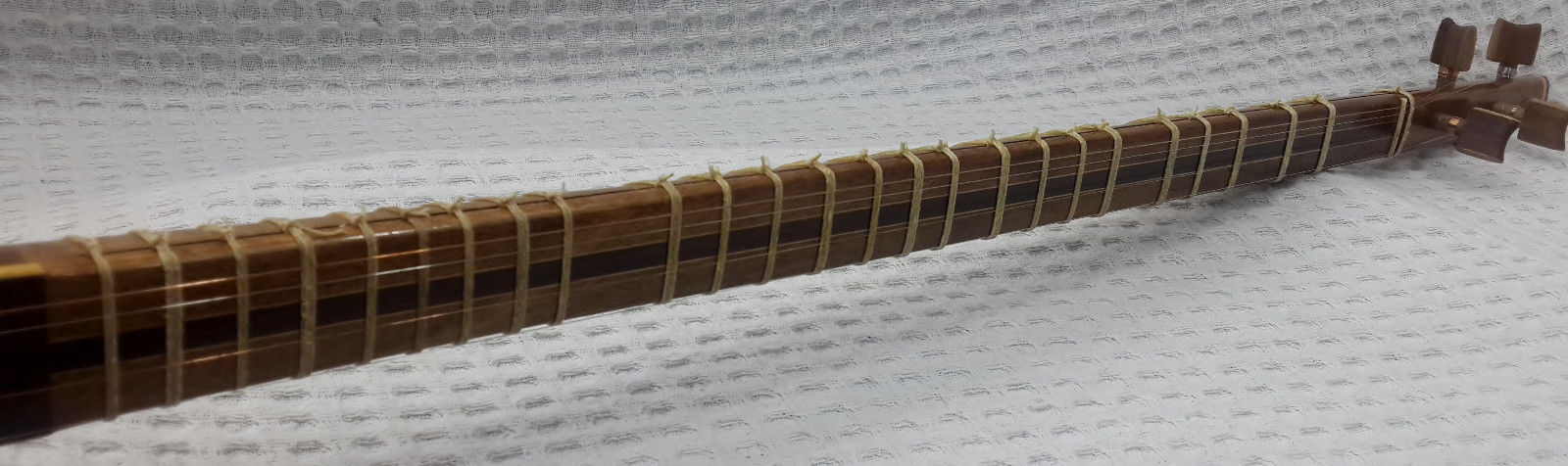
Setar geometric construction
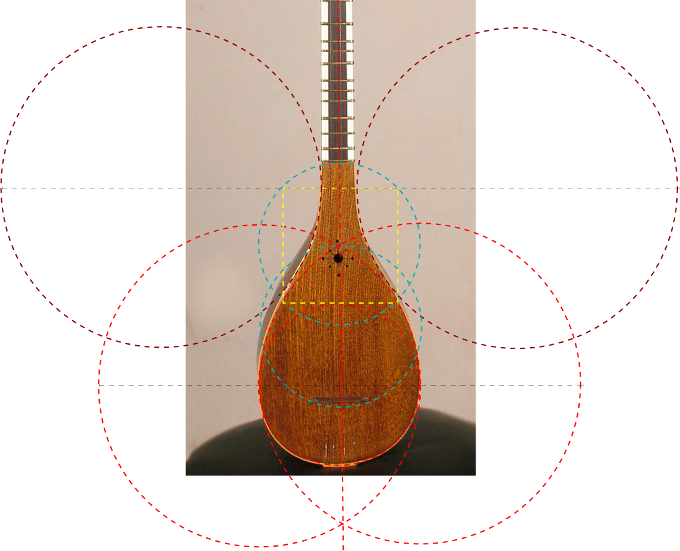 |
| Simple geometry using an real setar. |
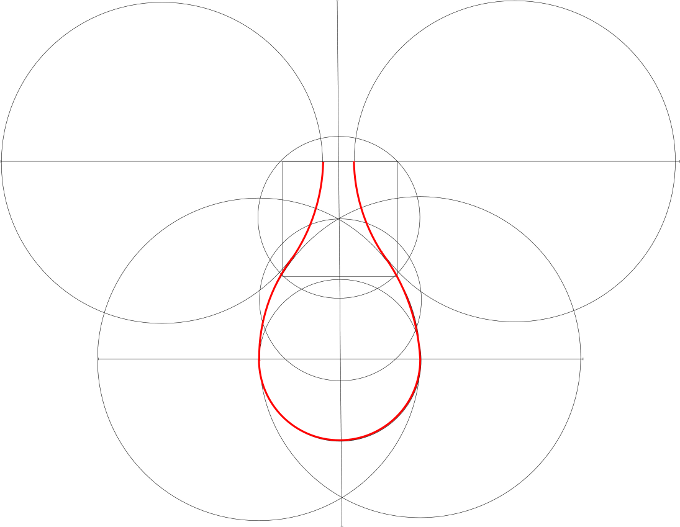 |
| Geometric construction. |
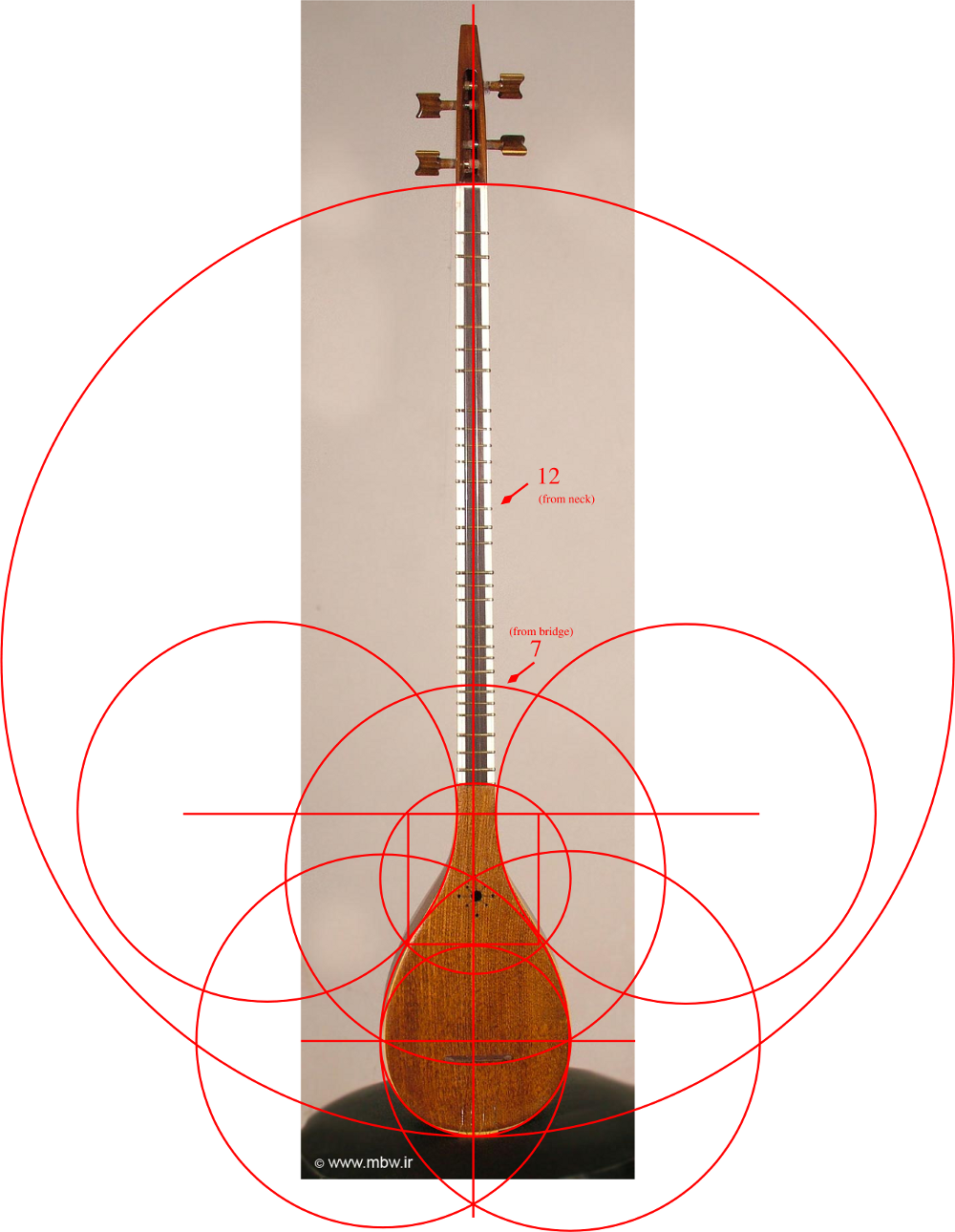 |
| Geometric construction (more detail). |
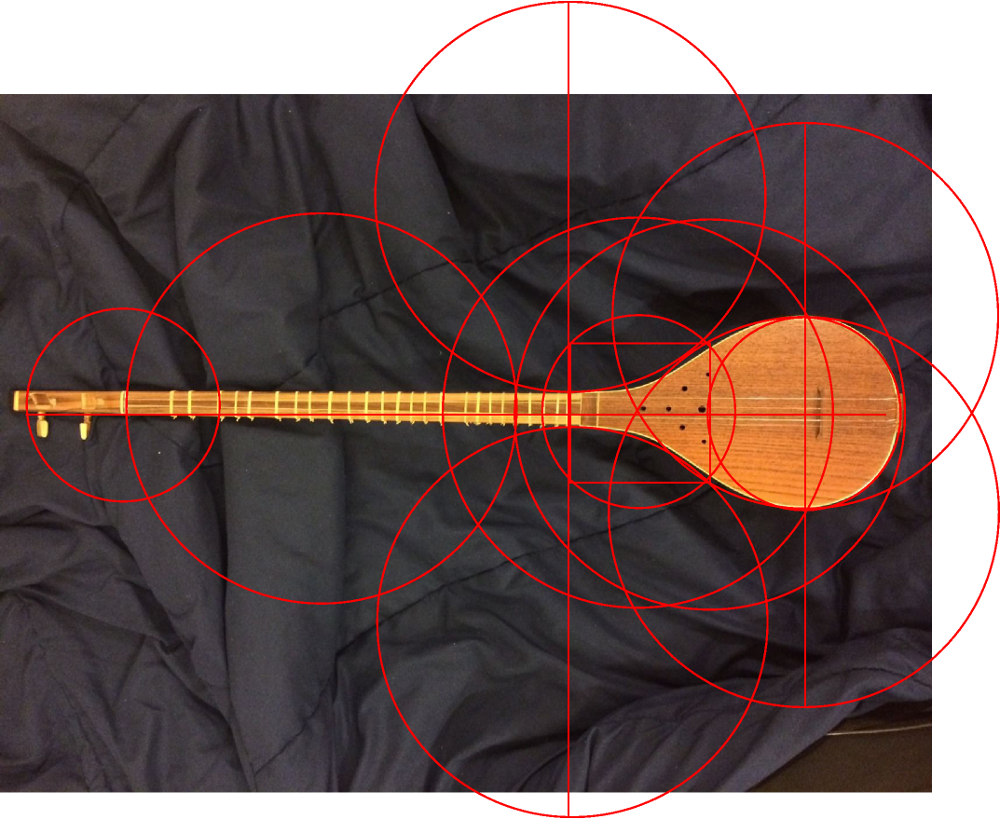 |
| Geometric construction (more detail). |
ç
Tags: setar, geometry











Romanillos guitar geometry
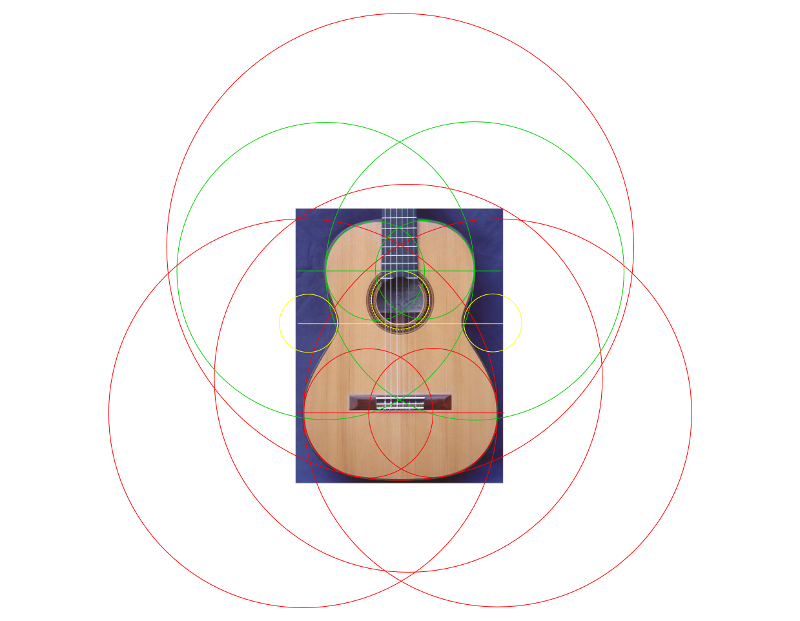
ç
Tags: Romanillos, guitar, geometry
◍ - rndf3 (300x300mm, Ballpoint pen on paper)

Esferográfica em papel | Ballpoint pen on paper (300x300mm)
[-]
◍ - rndf2 (300x300mm, Ballpoint pen on paper)

Esferográfica em papel | Ballpoint pen on paper (300x300mm)
[-]
◍ - rndf1 (300x300mm, Ballpoint pen on paper)

Esferográfica em papel | Ballpoint pen on paper (300x300mm)
[-]
◍ Polargraphy - rnd (Canson 200g acid free paper, 297x420mm, Ballpoint pen on paper)

Esferográfica em papel | Ballpoint pen on paper (Canson 200g acid free paper, 297x420mm)
[-]
02 E o seu maior defeito? Honestidade.
03 A coisa mais importante num homem? Honestidade.
04 E numa mulher? Honestidade.
05 O que é que mais aprecia nos seus amigos? Honestidade.
06 A sua actividade favorita é... pensar.
07 Qual é a sua ideia de felicidade? Estar quieto.
08 E o que seria a maior das tragédias? Morrer entretanto.
09 Quem você gostaria de ser, se não fosse você mesmo? Outro qualquer.
10 E onde gostaria de viver? No campo.
11 Qual é a sua cor favorita? #f5f5f5
12 E a flor? Papoila.
13 Um pássaro? Um pardal.
14 Os seus autores preferidos? Goethe, Fernando Pessoa
15 E os poetas de que mais gosta? Fernando Pessoa, David Mourão Ferreira,
16 Quem são os seus heróis de ficção? Fausto
17 E as heroínas?
18 O seu compositor favorito é... J. S. Bach
19 E os pintores de que mais gosta? Van Gogh
20 Quem são as suas heroínas na história?
21 E os heróis na vida real?
22 Quais são os seus nomes preferidos?
23 O que é que mais detesta? Paradoxos
24 Quais são as personagens históricas que mais despreza?
25 Que evento na história militar mais admira?
26 Que reforma mais admira?
27 Quais os dons da Natureza que gostaria de possuir?
28 Como gostaria de morrer?
29 Qual é o seu estado de espírito?
30 Com que falhas é mais indulgente? Quase todas.
31 Qual é o lema da sua vida? Não há lemas na vida.
Tags:
Projectos LMATE (2021/22)
Nesta página estão disponíveis as propostas para os projectos finais de Licenciatura Matemática Aplicada à Tecnologia e à Empresa do ISEL (ano lectivo 2021/2022).
- Estudo e modelação geométrica de estruturas de preenchimento variável em impressão 3D
- Parametrização e desenho automático de conectores para impressão 3D
- Autómatos celulares e impressão 3D
Para informações ou questões: tiago.charters.azevedo@isel.pt
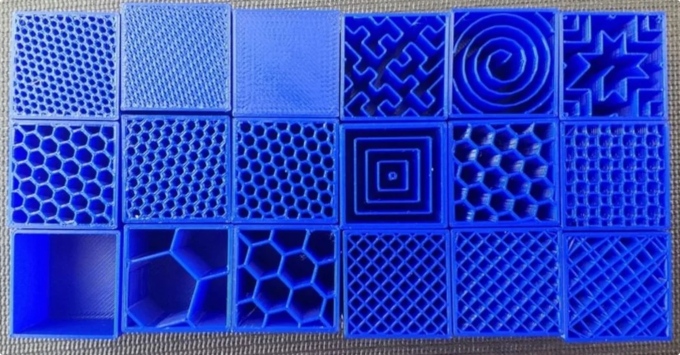
Estudo e modelação geométrica de estruturas de preenchimento variável em impressão 3D.
O infill dos objectos usados em impressão 3D tem uma influência determinante na rigidez mecânica, no seu desempenho funcional e sustentabilidade na utilização do plástico. Neste projecto pretende-se construir e implementar um algoritmo de infill, usando algoritmos de computação gráfica, que permita parametrizar diversas curvas arbitrárias para preenchimentos. Estes infill serão depois testados por impressão 3D na Oficina Digital do ISEL.
Exemplos típicos impressos em 3D por Fused Deposition Modeling (FDM).
Refs.:
J. Prša, J. Müller, F. Irlinger and T. C. Lueth, Evaluation of the infill algorithm fortrajectory planning of pointed ends for droplet-generating 3D printers, 2014 IEEE Inter-national Conference on Robotics and Biomimetics (ROBIO 2014), 2014, pp. 1560-1565, https://doi.org/10.1109/ROBIO.2014.7090556
Alexios Papacharalampopoulos, Harry Bikas, Panagiotis Stavropoulos, Path planning for the infill of 3D printed parts utilizing Hilbert curves, Procedia Manufacturing, Volume 21, 2018, pp. 757-764, https://doi.org/10.1016/j.promfg.2018.02.181
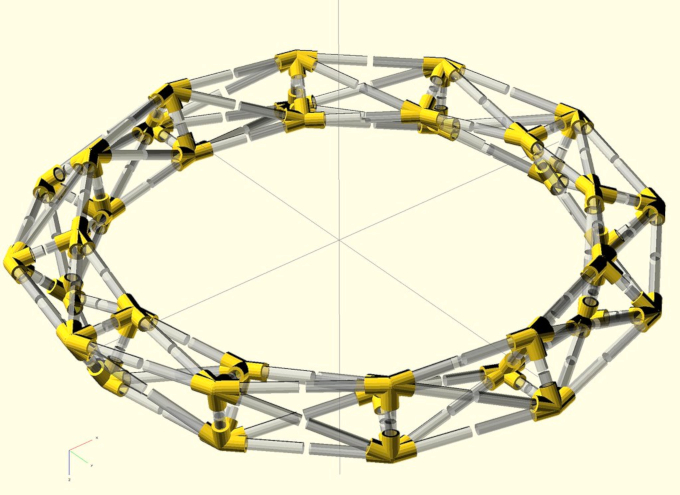
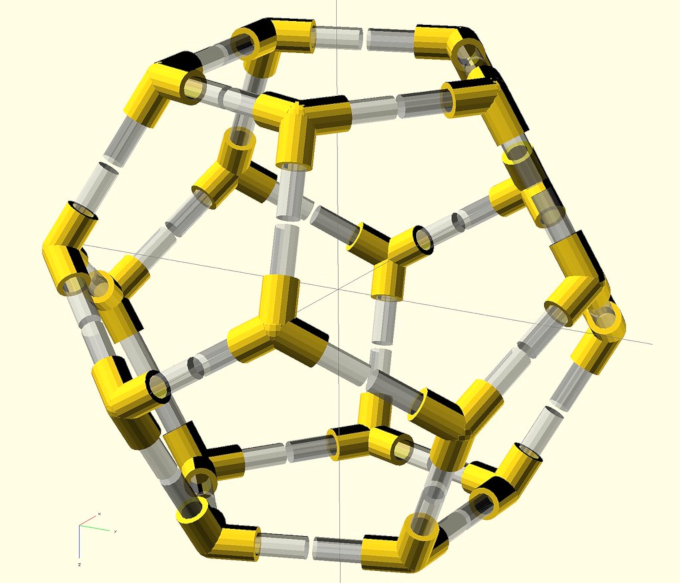
Parametrização e desenho automático de conectores para impressão 3D
Treliças são sistemas constituídos por elementos indeformáveis (barras) unidos entre si por junções e sujeitos apenas a cargas aplicadas nos nós. Assim as barras ficam exclusivamente sujeitas a esforços normais de tracção ou compressão. Neste projecto pretende-se implementar em OpenSCAD (http://openscad.org/) um algoritmo para desenho automático de todos os conectores (nós) para impressão 3D para uma dada treliça. As impressões 3D serão realizadas na Oficina Digital do ISEL.
Simulações em OpenSCAD:
Torus de Mobius
Dodecaedro
Refs.:
Trammell Hudson’s OpenSource Projects https://github.com/osresearch/papercraft
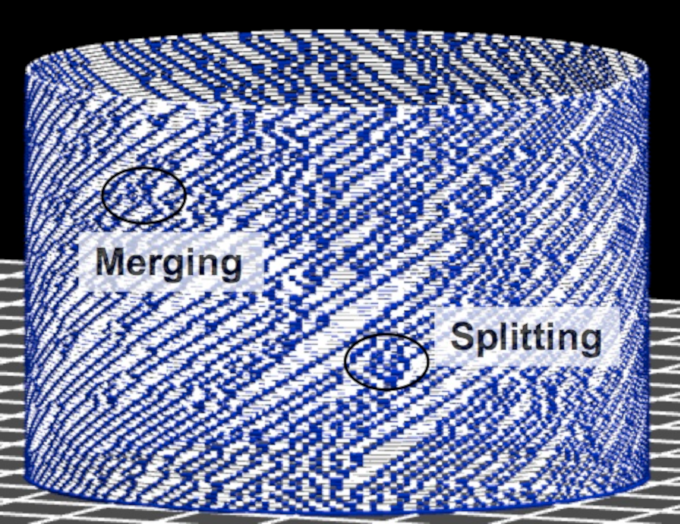
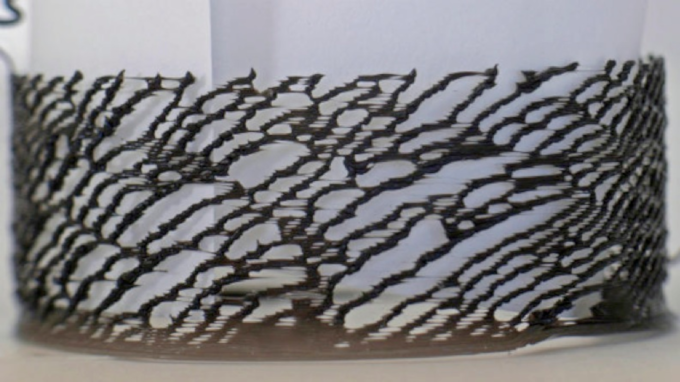
Autómatos celulares e impressão 3D
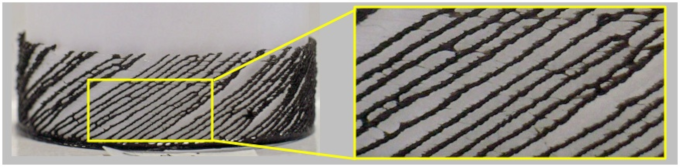
As impressoras 3D são usualmente usadas para impressão de objectos desenhados deterministicamente por software CAD. Com velocidade e extrusão constantes as impressões 3D por Fused Deposition Modeling (FDM) permitem gerar padrões auto-organizados semelhantes à dinâmica de autómatos celulares estocásticos de dimensão 1.
O objectivo deste projecto consiste em catalogar e tipificar as classes de equivalência dos diferentes padrões e estruturas obtidas usando autómatos celulares estocásticos de dimensão 1 como modelo teórico descritivo. As impressões 3D serão realizadas na Oficina Digital do ISEL.
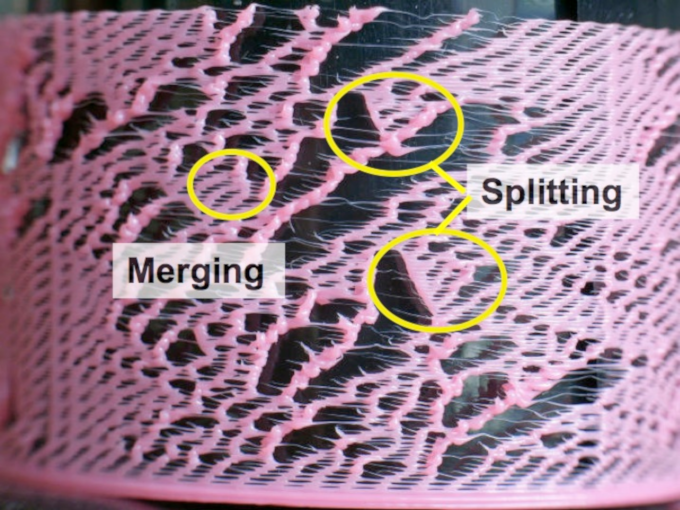
Refs.:
Kanada, Y., 3D printing and simulation of naturally randomized cellular automata, ArtifLife Robotics 19, 311–316 (2014). https://doi.org/10.1007/s10015-014-0182-9
Tags: LMATE, ISEL
Programas para download
Costumo escrever muitos programas em GNU/Octave. Na maioria dos casos relacionados com a
minha actividade de docência (métodos numéricos).
Claro, todos sob um licença GNU
General Public License (GPL).

É dada permissão para copiar, distribuir e/ou modificar todos os programas/textos aqui disponibilizados nos termos da GNU GENERAL PUBLIC LICENSE Versão 3 ou qualquer outra versão posterior publicada pela Free Software Foundation. Uma cópia da licença - GNU GENERAL PUBLIC LICENSE.
Notas:
- A data referida corresponde à última modificação do programa.
- De modo a não permitir que o Octave quebre as linhas é necessária a
instrução
split_long_rows=0. - Os métodos seguintes implementados foram pensados para uso demonstrativo,
por isso, para os correr é necessário formatar o output usando o comando
format short g. - Os programas não foram escritos a pensar na compatibilidade entre o programa Matlab e o GNU/Octave no entanto a compatibilidade por ser obtida com as seguintes substituições:
endif -> end endfor -> end endfunction -> end
GNU/Octave
Métodos numéricos básicos
- BISSEC (ficheiro auxiliar F)
- Método da bissecção (Agosto 2007)
- FPOINT (ficheiro auxiliar F)
- Método do ponto fixo (Agosto 2007)
- SECANT (ficheiro auxiliar F)
- Método da secante (Agosto 2007)
- REGULAFALSI (ficheiro auxiliar F)
- Método da falsa posição (Agosto 2007)
- NEWTON (ficheiro auxiliar F, DF)
- Método de Newton (Agosto 2007)
- NEWTONSYS (ficheiro auxiliar FFUN, JFUN)
- Método de Newton para sistemas de equações não lineares (Agosto 2007)
- LSQUARE
- Método dos mínimos quadrados (Agosto 2007)
- NEWTONDD
- Diferenças divididas (Agosto 2007)
- GAUSSEL
- Solução de um sistema linear por condensação de Gauss (Agosto 2007)
- GAUSSELK
- Solução de um sistema linear por condensação de Gauss (mostra explicitamente cada passo) (Agosto 2007)
- JACOBI
- Método de Jacobi - solução de um sistema linear (Agosto 2007)
- GAUSSSEIDEL
- Método de Gauss-Seidel - solução de um sistema linear (Agosto 2007)
- INTERPFRAC, Ref: Michael Barnsley, Fractals Everywhere, Academic Press, 1988
- Interpolação fractal (Agosto 2007)
- INTTRAP (ficheiro auxiliar F)
- Integração numérica - regra dos trapézios (simples e composta) (Agosto 2007)
- INTSIMPSON (ficheiro auxiliar F)
- Integração numérica - regra de Simpson (simples e composta) (Agosto 2007)
Matrizes especiais
- REULER
- Matriz de rotação 3D em termos de ângulos de Euler (Julho 2007)
- RQUAT
- Matriz de rotação 3D em termos de quaterniões (Julho 2007)
- QUAT2EULER
- Mudança de variáveis - quaterniões para ângulos de Euler (Julho 2007)
Funções especiais
- GAMMACONST
- Constante de Euler (Agosto 2007)
- POLYVALB (ficheiro auxiliar F)
- Polinómios de Bernstein (Agosto 2007)
- LAMBERT Ref: Robert M. Corless, G. H. Gonnet, D. E. G. Hare, D. J. Jeffrey, and D. E. Knuth, "On the Lambert W Function", Advances in Computational Mathematics, volume 5, 1996, pp. 329--359.
- Função Lambert W0 (implementação muito ingénua, mas tem, no entanto, uma precisão de 10^-12) (Outubro 2007)
- HAAR
- Coeficientes da decomposição em wavelets (Haar) (Novembro 2007)
- HAARVAL
- Calcula o valor de f dados os coeficientes da decomposição em wavelets (Haar) (Novembro 2007)
- GETSTEPS
- Calcula o valor dos degraus da decomposição em wavelets (Haar) (Novembro 2007)
- PLOTHAAR
- Exemplos da decomposição em wavelets (Haar) (Novembro 2007)
Fractais
- RANDINT
- Gerador aleatório de um inteiro k entre 1 e n, com probabilidade dada por um vector p=(p1,p2,...,pn). (Agosto 2007)
- RANDITERALG (ficheiros auxiliares: FERN, SIERP, SIERP3) Ref: Michael Barnsley, Fractals Everywhere, Academic Press, 1988
- "Random iteration algorithm". (Outubro 2007)
Jogos
Super fórmulas
- SF2D
- Super fórmula 2D (Novembro 2008)
- SF3D
- Super fórmula 3D (Novembro 2008)
Super quádricas
- SUPERELLIPSE
- Super elipses (Novembro 2008)
- SUPERTOROID
- Super torus (Novembro 2008)
Tags: GNU/Octave, programas, download
Potpourri guitar circuits
; INVALID LISP CODE
ç
Tags: guitar, diy, circuits
Potpourri guitar circuits
; INVALID LISP CODE
ç
Tags: guitar, diy, circuits
Algumas funções em Lisp para o algoritmo de Porter
(setq max-lisp-eval-depth 100000
max-specpdl-size 10000)
Funções auxiliares
(defun list-to-string (l) "Return a STRING which is the concatenation of the elements of L." (if (not l) nil (if (stringp (car l)) (concat (car l) (list-to-string (cdr l))) (list-to-string (cdr l))))) (defun join-string (xs &optional sep) (cond ((null xs) "") ((null (cdr xs)) (car xs)) (t (concat (car xs) (or sep "") (join-string (cdr xs) sep))))) (defun string-to-strings (s) "Convert a string into a list of strings." (let ((i (- (length s) 1)) (l '())) (while (<= 0 i) (setq l (cons (aref s i) l) i (- i 1))) (mapcar (lambda (x) (char-to-string x)) l)))
Definição das vogais em português
(setq vn (string-to-strings "aeiouáàéíóúâêôAEIOUÁÀÉÍÓÚÂÊÔ")) (setq vnc (mapcar (lambda (x) (string-to-char x)) vn)) (defun vowelp (v) "É v uma vogal? Sim -> t, Não -> nil. " (if (eq () (memq (string-to-char v) vnc)) nil t)) (defun consonantp (v) (if (vowelp v) nil t)) (defun tilde-rm (v) "ã -> a~, õ -> o~" (cond ((eq (string-to-char '"ã") (string-to-char v)) "a~") ((eq (string-to-char '"õ") (string-to-char v)) "o~") (v))) (defun tilde-rm-string (str) "Avião Cão-> Avia~o Ca~o" (join-string (mapcar (lambda (x) (tilde-rm x)) (string-to-strings str)))) (defun m (str) "#CV como está definido no artigo original do Porter" (let* ((i 0) (count 0)) (while (< i (- (length (sts-rm-tnil str)) 1)) (if (not (eq (nth i (sts-rm-tnil str)) (nth (+ i 1) (sts-rm-tnil str)))) (setq count (+ 1 count))) (setq i (+ i 1))) (if (evenp count) (/ count 2) (/ (+ 1 count) 2)))) (defun R1 (str) "Returns R1 part of the word." (let* ((lstr (string-to-strings(tilde-rm-string str)))) (if (> (length lstr) 1) (if (vowelp (car lstr)) (if (consonantp (cadr lstr)) (join-string (cddr lstr)) (R1 (join-string (cdr lstr)))) (R1 (join-string (cdr lstr)))) ))) (defun R2 (str) "Returns R1 part of R2." (R1 (R1 str))) (defun RV (str) "Retunrs de RV part" (let* ((lstr (string-to-strings(tilde-rm-string str)))) (cond ((consonantp (cadr lstr )) (if (vowelp (caddr lstr)) (if (consonantp (car (cdddr lstr))) (join-string (cdddr lstr)) (join-string (cddddr lstr))) ((and (vowelp (car lstr)) (vowelp (cadr lstr))) (join-string (cdddr lstr))))) ((> (length lstr) 3) (join-string (cdddr lstr)))))) (defun sort-list-words-length (lstr) "Ordena as palavras, numa lista, por ordem decrescente do número de letras." (let ((j 0)) (while (<= j (length lstr)) (let ((i 0)) (while (<= i (length lstr)) (if (< (length (nth i lstr)) (length (nth (+ 1 i) lstr))) (swap lstr i (+ 1 i)) nil) (setq i (+ 1 i)))) (setq j (+ 1 j)))) lstr)
Lista de sufixos
(setq list-suff
'("eza" "ezas" "ico" "ica" "icos" "icas" "ismo" "ismos" "ável"
"ível" "ista" "istas" "oso" "osa" "osos" "osas" "amento"
"amentos" "imento" "imentos" "adora" "ador" "ação" "adoras"
"adores" "ações" "ante" "antes" "ância"))
(setq list-suff-verbs
'("ada" "ida" "ia" "aria" "eria" "iria" "ará" "ara" "erá" "era" "irá" "ava" "asse"
"esse" "isse" "aste" "este" "iste" "ei" "arei" "erei" "irei" "am" "iam" "ariam" "eriam"
"iriam" "aram" "eram" "iram" "avam" "em" "arem" "erem" "irem" "assem" "essem" "issem"
"ado" "ido" "ando" "endo" "indo" "arão" "erão" "irão" "ar" "er" "ir" "as" "adas" "idas"
"ias" "arias" "erias" "irias" "arás" "aras" "erás" "eras" "irás" "avas" "es" "ardes"
"erdes" "irdes" "ares" "eres" "ires" "asses" "esses" "isses" "astes" "estes" "istes"
"is" "ais" "eis" "íeis" "aríeis" "eríeis" "iríeis" "áreis" "areis" "éreis" "ereis"
"íreis" "ireis" "ásseis" "ésseis" "ísseis" "áveis" "ados" "idos" "ámos" "amos"
"íamos" "aríamos" "eríamos" "iríamos" "áramos" "éramos" "íramos" "ávamos" "emos"
"aremos" "eremos" "iremos" "ássemos" "êssemos" "íssemos" "imos" "armos" "ermos"
"irmos" "eu" "iu" "ou" "ira" "iras"))
(setq list-res-suff '("os" "a" "i" "o" "á" "í" "ó"))
Alguns testes
(R1 "Aleatoriamente" );"eatoriamente" (R2 "Aleatoriamente" );"oriamente" (RV "Aleatoriamente" );"toriamente"
Tags: algoritmo, Porter, Emacs Lisp
Created: NaN
Last updated: 16-02-2026 [16:03]
For attribution, please cite this page as:
Charters, T., "Sage - diale.org": https://nexp.pt/sgae.html (16-02-2026 [16:03])
(cc-by-sa) Tiago Charters - tiagocharters@nexp.pt
