Portrait drawing by Paul the robot
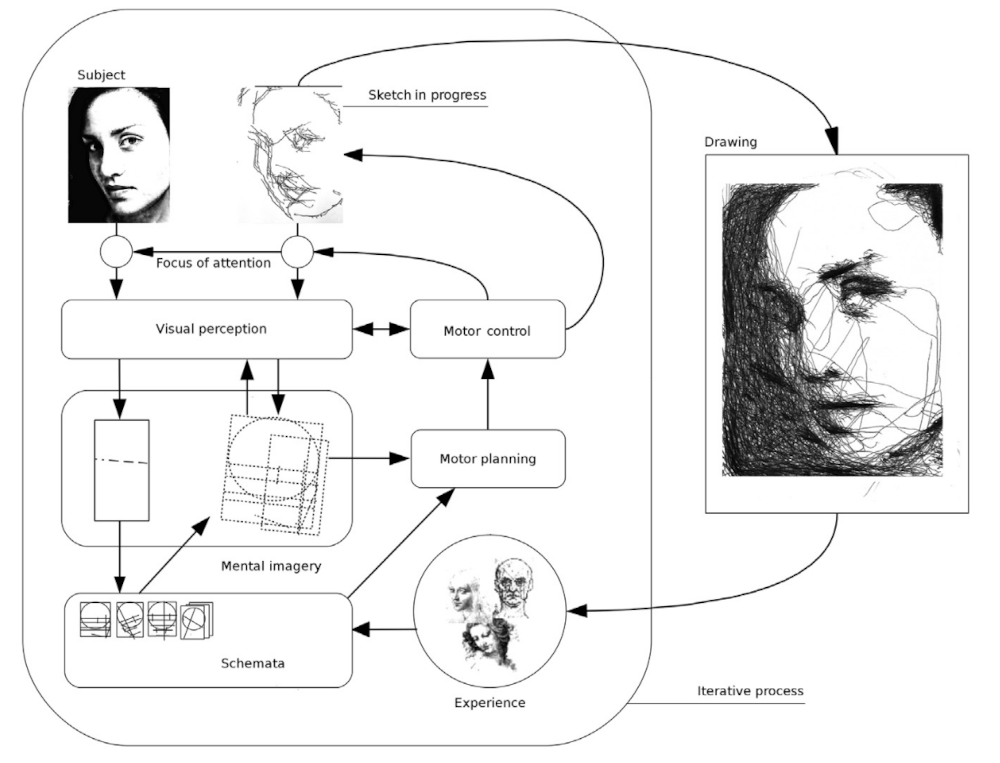
"We describe Paul, a robotic installation that produces observational face drawings of people. Paul is a naive drawer: it does not have highlevel knowledge of the structures constitutive of the human face (such as the mouth, nose, eyes) nor the capability of learning expertise based on experience as a human would. However, Paul is able to draw using the equivalent of an artist's stylistic signature based on a number of processes mimicking drawing skills and technique, which together form a drawing cycle. Furthermore, we present here our first efforts in implementing two different versions of visual feedback to permit the robot to iteratively augment and improve a drawing which initially is built from a process of salient lines recovery. The first form of visual feedback we study we refer to as computational as it involves a purely internal (memory-based) representation of regions to render via shading by the robot. The second version we call physical as it involves the use of a camera as an ‘eye’ taking new snapshots of the artefact in progress. This is then analysed to take decisions on where and how to render shading next. A main point we emphasise in this work is the issue of embodiment of graphical systems, in our case in a robotic platform. We present our arguments in favour of such a position for the graphics community to reflect upon. Finally, we emphasise that the drawings produced by Paul have been considered of interest by fine art professionals in recent international art fairs and exhibitions, as well as by the public at large. One drawing is now in the Victoria and Albert museum collection. We identify a number of factors that may account for such perceived qualities of the produced drawings."
Criado/Created: 24-10-2021 [15:08]
Última actualização/Last updated: 09-10-2023 [15:52]

(c) Tiago Charters de Azevedo