Idea for a robot
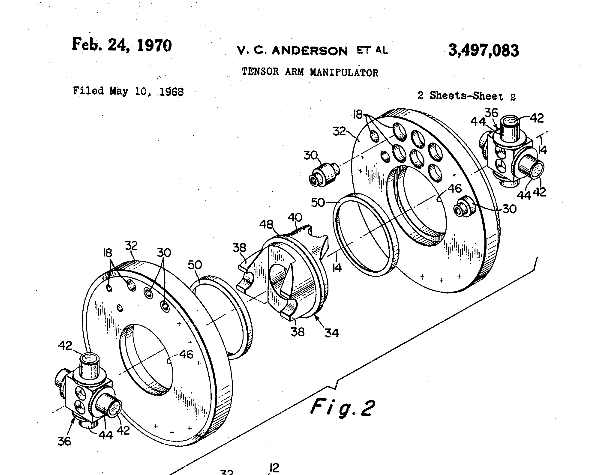
An object of the present invention is to provide a manipulator which has dexterity similar to the human arm.
Criado/Created: 20-10-2018 [22:43]
Última actualização/Last updated: 09-10-2023 [15:52]

(c) Tiago Charters de Azevedo
An object of the present invention is to provide a manipulator which has dexterity similar to the human arm.
Criado/Created: 20-10-2018 [22:43]
Última actualização/Last updated: 09-10-2023 [15:52]
(c) Tiago Charters de Azevedo