The milliDelta
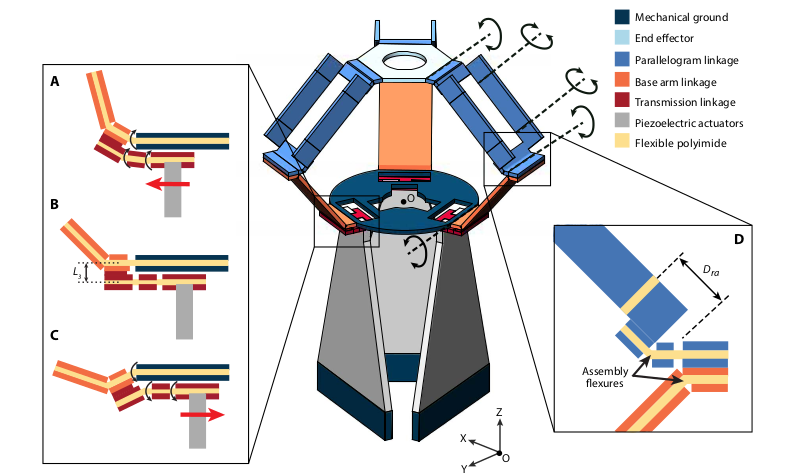
"Delta robots have been widely used in industrial contexts for pick-and-place applications because of their high precision and speed. These qualities are also desirable at the millimeter scale for applications such as vibration cancellation in microsurgery and microassembly or micromanipulation. Developing a millimeter-scale Delta robot that maintains the characteristic input-output behavior and operates with high speed and precision requires overcoming manufacturing and actuation challenges. We present the design, fabrication, and characterization of an adapted Delta robot at the millimeter scale (the “milliDelta”) that leverages printed circuit microelectromechanical system manufacturing techniques and is driven by three independently controlled piezoelectric bending actuators. We validated the design of the milliDelta, where two nonintersecting perpendicular revolute joints were used to replace an ideal universal joint. In addition, a transmission linkage system for actuation was introduced to the laminate structure of the milliDelta. This 15 millimeter–by–15 millimeter–by–20 millimeter robot has a total mass of 430 milligrams and a payload capacity of 1.31 grams and operates with precision down to ~5 micrometers in a 7.01-cubic-millimeter workspace. In addition, the milliDelta can follow periodic trajectories at frequencies up to 75 hertz, experiencing velocities of ~0.45 meters per second and accelerations of ~215 meters per squared second. We demonstrate its potential utility for high-bandwidth, high-precision applications that require a compact design."
Criado/Created: 19-12-2021 [15:22]
Última actualização/Last updated: 09-10-2023 [15:52]

(c) Tiago Charters de Azevedo