Flexure-based Delta robot
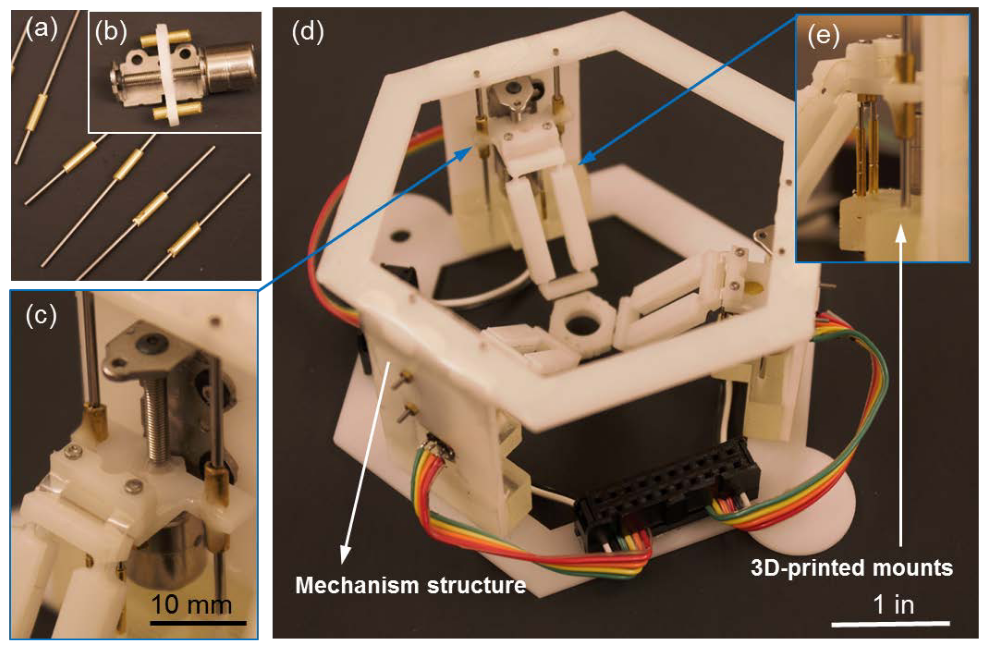
"Mesoscale electromechanical systems find applications in fields such as medical instrumentation, soft robotics, microscopy, flexible electronics and imagining. This paper implements the printed circuit MEMS (PC-MEMS) process for the fabrication of a ‘pop-up’ flexure-based mesoscale system that exploits the simplicity of 2-D manufacturing techniques such as sheet-metal operations and laser cutting to realize a 3-D mechanism. The fabrication of a laminated Delta robot with prismatic actuation is presented to exemplify this process. A working device with actuation and functional components such as linear guides, stepper motors and limit switches is designed and fully realized. Because the mechanism is popped out of the plane to achieve its 3D shape, we present a stiffness analysis to arrive at the out-of-plane (or ‘pop-out’) angles that the planar system must accommodate so that constraints/limits on actuator torque/force can be can satisfied while producing an operational system. The simplicity of the processes makes it a candidate for the use in the emerging open-source hardware technologies for fabricating low-cost, complex, electromechanical systems."
PDF: https://sci-hub.st/https://doi.org/10.1016/j.jmapro.2016.06.016
Criado/Created: 17-08-2021 [15:22]
Última actualização/Last updated: 09-10-2023 [15:52]

(c) Tiago Charters de Azevedo