3D-printed programmable tensegrity for soft robotics
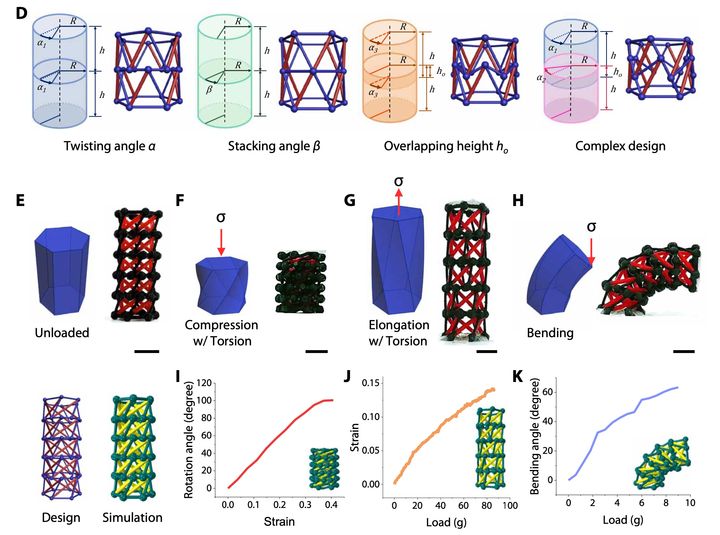
Tensegrity structures provide both structural integrity and flexibility through the combination of stiff struts and a network of flexible tendons. These structures exhibit useful properties: high stiffness-to-mass ratio, controllability, reliability, structural flexibility, and large deployment. The integration of smart materials into tensegrity structures would provide additional functionality and may improve existing properties. However, manufacturing approaches that generate multimaterial parts with intricate three-dimensional (3D) shapes suitable for such tensegrities are rare. Furthermore, the structural complexity of tensegrity systems fabricated through conventional means is generally limited because these systems often require manual assembly. Here, we report a simple approach to fabricate tensegrity structures made of smart materials using 3D printing combined with sacrificial molding. Tensegrity structures consisting of monolithic tendon networks based on smart materials supported by struts could be realized without an additional post-assembly process using our approach. By printing tensegrity with coordinated soft and stiff elements, we could use design parameters (such as geometry, topology, density, coordination number, and complexity) to program system-level mechanics in a soft structure. Last, we demonstrated a tensegrity robot capable of walking in any direction and several tensegrity actuators by leveraging smart tendons with magnetic functionality and the programmed mechanics of tensegrity structures. The physical realization of complex tensegrity metamaterials with programmable mechanical components can pave the way toward more algorithmic designs of 3D soft machines.
Criado/Created: 03-10-2020 [09:39]
Última actualização/Last updated: 09-10-2023 [15:52]

(c) Tiago Charters de Azevedo